
Application of Cooldrive R6 Integrated Servo In Industrial Robot
Abstract: The purpose of this paper is to introduce the application of cooldriver6 servo driver in 6-axis joint industrial robot, and to provide a complete solution of robot electronic control system for customers.
Key words: Tsino Dynatron Cooldrive R6 industrial robot high end servo integrated servo
1、Overview
In the past two years, facing the rising cost of labor force, industrial robots are increasingly relied on by enterprises, and the industrial robot market in China is showing explosive growth. According to the statistics of International Robot Association (IFR), the global sales volume of industrial robots in 2014 was about 225000, of which the sales volume in Asia accounted for almost two-thirds. The sales volume of industrial robots in China market increased by 54%, reaching about 56000. However, it should be noted that the sales volume of local robot suppliers is only 16000. One of the most important reasons is that the localization process of the core parts of the robot is slow. The domestic robot manufacturers can only import foreign products, resulting in high cost of the whole machine, which is at a disadvantage in the competition with foreign manufacturers.
2. Domestic 20kg six joint industrial robot
The 20kg six joint industrial robot used in this project is the latest model made in China, which has the characteristics of compact structure, high joint speed, fast dynamic response, high precision and strong overload capacity. The electric control system adopts the bus structure, which is easy to expand and apply. It is suitable for cutting, grinding, loading and unloading. The product performance is as follows:

3、System Design
3.1 Customer Demand
The customer's 6-joint industrial robot is required to achieve high joint speed and repetitive positioning accuracy, while maintaining the stability of the robot when running on load. In addition, the customer requires that the internal functional parameters of the servo driver can be manually set online through the controller, so as to achieve accurate control.
3.2 design difficulties
Industrial robot is a very typical multi axis control system. In order to make the robot achieve high precision of repeated positioning, in addition to the strong path planning algorithm and interpolation function of the controller, the servo driver must also ensure that all joints are strictly synchronized when executing the controller position command. In order to improve the speed of the robot, it is necessary for the servo system to have strong instantaneous overload ability and high dynamic response characteristics.
How to reduce the vibration of robot in the process of operation is always a problem of robot servo system, which is also a reason that many domestic servo products cannot be applied to industrial robots.
Vibration mainly occurs in two working conditions, one is when the robot starts and stops, the robot body and the end will vibrate; the other is when the robot runs at high speed and moves in a large range, the body will vibrate and the running track will deviate greatly. The main reason for the vibration is that the inertia of each joint of the robot has changed greatly. In order to eliminate the vibration, various feed forward compensation control functions must be added to the servo drive.
3.3 system scheme design
Through the in-depth analysis of customers' needs, we designed the electronic control system solution of "Keba controller + cooldrive A8" servo driver for customers.

The advantages of this system are:
1. Robot specific control system
This project selects kemotion control system developed by Keba for robot industry, including controller, video teaching box and control software. Its controller and video teaching box support the high-speed industrial Ethernet communication of EtherCAT, which has high computing performance and communication speed.
Kemotion also provides a powerful robot control software, in which a variety of types of robot path planning models are built in, which can quickly complete the development of the robot; at the same time, the software also provides a wealth of compensation algorithms and interpolation functions to ensure the control accuracy of the robot.
2. CoolDrive R6 robot special integrated servo driver
CoolDrive R6 is a servo product tailored for Tsino Dynatron after conducting a large number of market and customer demand research on industrial robots. As the first domestic robot dedicated integrated servo driver, CoolDrive R6, whether from the design concept, integrated function or product customization, is really from the perspective of industry users, focusing on meeting the actual needs of customers.
CoolDrive R6 is designed with all in one, which integrates six servo axes in the compact fuselage, and also reserves the expansion space to provide additional axes for the robot. Compared with the current general servo scheme, it can save up to 50% space.
At the same time, CoolDrive R6 adds compensation algorithms such as velocity, acceleration feed forward compensation, torque compensation, etc., and develops functions such as Positioning vibration suppression, inertia feed forward, etc., which can better solve the vibration generated by the robot body in high-speed operation and rapid positioning, and improve the dynamic characteristics of the robot.
In addition, CoolDrive R6 also adds motor flux weakening control technology to realize the light load and high-speed operation of the robot, and adds encoder signal correction technology to improve the stability of the robot and reduce the noise during operation.
4. Actual performance test of robot
In the actual test process, the robot will vibrate obviously when it is running under full load without adding the compensation algorithms such as velocity, acceleration feed forward compensation and torque compensation. At the moment when the robot starts, if the moment compensation is not given in advance, front edge of the robot body will sink due to the action of gravity, which is commonly known as "nodding". When the robot stops quickly from high-speed running, if there is no " Positioning vibration suppression " function, the robot will experience jitter due to the sudden change of inertia.
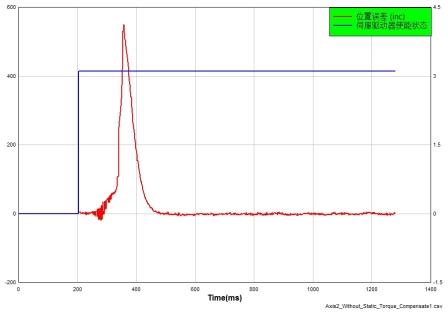
The figure below shows the position error of the robot when the compensation and vibration suppression functions are not turned on, and the obvious vibration phenomenon can be seen.
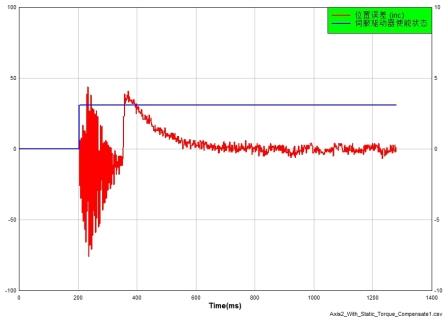
The figure below shows the position error of the robot body after the compensation and vibration suppression functions are turned on. It can be seen that the vibration of the robot body has been effectively suppressed.
5. Conclusion
Tsino Dynatron is committed to providing domestic high-end servo system for domestic robot manufacturers, which can meet the requirements of robot on servo system in performance and function, and has no high price of foreign products, so as to realize localization of key parts of robot, reduce the overall cost of domestic robot manufacturers, and improve the competitiveness of domestic robots.



