场景1
问题描述
机器人正常上电后,示教器Mot(伺服ON)时正常,一按Start键,J5驱动器报“电机V相瞬时过载”。
分析及解答
检查电气柜航插接线,发现Hipeface编码器SIN+、SIN-接反,导致正弦落后于余弦,反馈由正值变为负值,导致驱动器不停的在调整,最终报“电机V相瞬时过载”。
场景2
问题描述
驱动器一上电,J4驱动器就报“电机W相瞬时过载”。
分析及解答
观察驱动器W相电流观测值为30A,正常情况下应该在0附近,正常情况下AD值出厂时已经校准,分析为驱动器AD采样电路有问题。
场景3
问题描述
喷涂机器人,J4驱动器简易点动模式下试运行,短时间使能后未发现异常,一点慢速运行,驱动器报“电机V相瞬时过载”。
分析及解答
抓取故障时电流波形,如图电机V相瞬时过载图1,电流已经达到3倍过载。
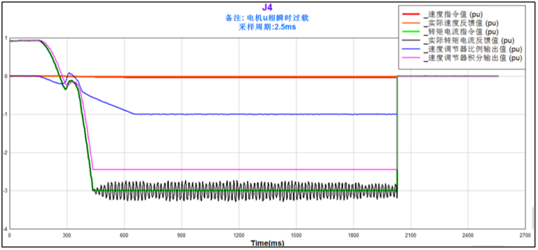
图1 电机V相瞬时过载
只给驱动器使能信号,一会,驱动器报“电机V相瞬时过载”,如图电机V相瞬时过载2。电流值一直在往上增。
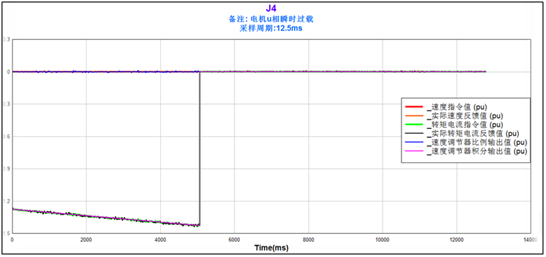
图2 电机V相顺势过载
调节速度环参数和电流环参数,故障依旧。
检查电机内部动力线接线,发现V/W两相相序接反,对调后问题解决。
电机U/V/W瞬时过载其他可能原因
1) 电机抱闸未释放。
2) 加速度时间设置过小。
2) 负载最大力矩大于电机所能提供的最大输出力矩。
4) 负载机械存在堵转现象。
5) 电机相序错误。
6)驱动器PI参数设置不合理。