场景1
问题描述:机器人速度的动态参数从80%放到100%,在其他参数一样的情况下,机器人100%速度运行,J2驱动器报“驱动器硬件过流”,波形如下驱动器硬件过流图1、驱动器硬件过流图2:
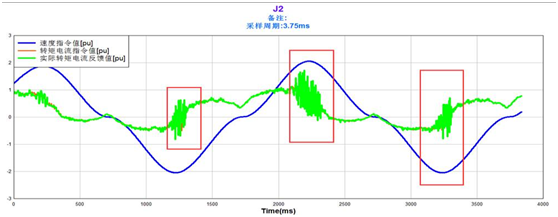
图1 驱动器硬件过流
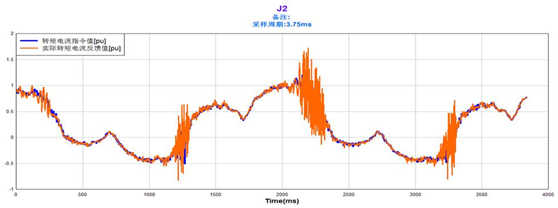 图2 驱动器硬件过流
图2 驱动器硬件过流
分析及解答
有波形可知,J2在高速时,电流环出现振荡,调整电流环积分时间常数,从2000改为6000,机器人运行刚刚程序将近1小时,J2没有再报“驱动器硬件过流”。调整后的波形如驱动器硬件过流图3所示。 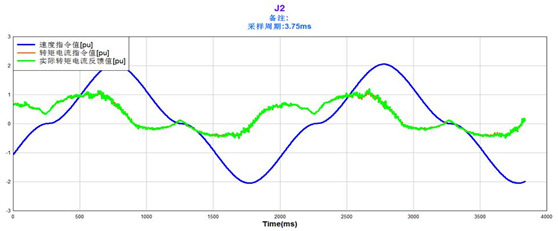
图3 驱动器硬件过流
场景2
问题描述
电机额定转速3000r/min,最高转速6000r/min,提高机器人速度,J4/J5电机运行到3700r/min时,驱动器报“驱动器硬件过流”。
分析及解答
抓取故障时速度和电流的波形,如下图“驱动器硬件过流图1”。
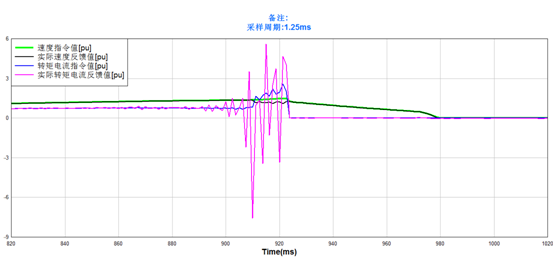
图1 “驱动器硬件过流”
从上图分析可以看出,驱动器在高速时,电流环波形出现了振荡,调整电流环参数,3700r/min时,驱动器依然报“驱动器硬件过流”。检查驱动器电机参数,发现客户提供的线绕阻电阻、线绕阻电感、电机反电动势系数等参数与电机手册中查到的电机参数有所出入,按电机厂家手册参数输入后,电机转速可以跑到5500r/min。由此判断,驱动器报“驱动器硬件过流”的原因是电机参数设置不合理。
场景2目的:
1) 给出“驱动器硬件过流”的原因之一:电机参数设置不合理或错误。
2) 给出“电机达不到最高转速”的原因之一:电机参数设置不合理或错误。
驱动器硬件过流其他可能原因:
1)电机相序接线错误。(同电机U/V/W瞬时过载场景3)